EMO Hannover 2025
Endlich geht es los: Die EMO Hannover 2025 öffnet ihre Tore und BEC Robotics ist gemeinsam mit KUKA in Halle 6,...
Der MRP-Sockel ist mit allen für den autonomen Betrieb erforderlichen Komponenten ausgestattet. Dazu gehören eine SPS, eine Robotersteuerung (KRC5), Sicherheitssensorik, ein Modul zur Kommunikation mit Maschinen und Anlagen, eine integrierte Energieversorgung sowie ein Druckluftspeicher für das Andocksystem.

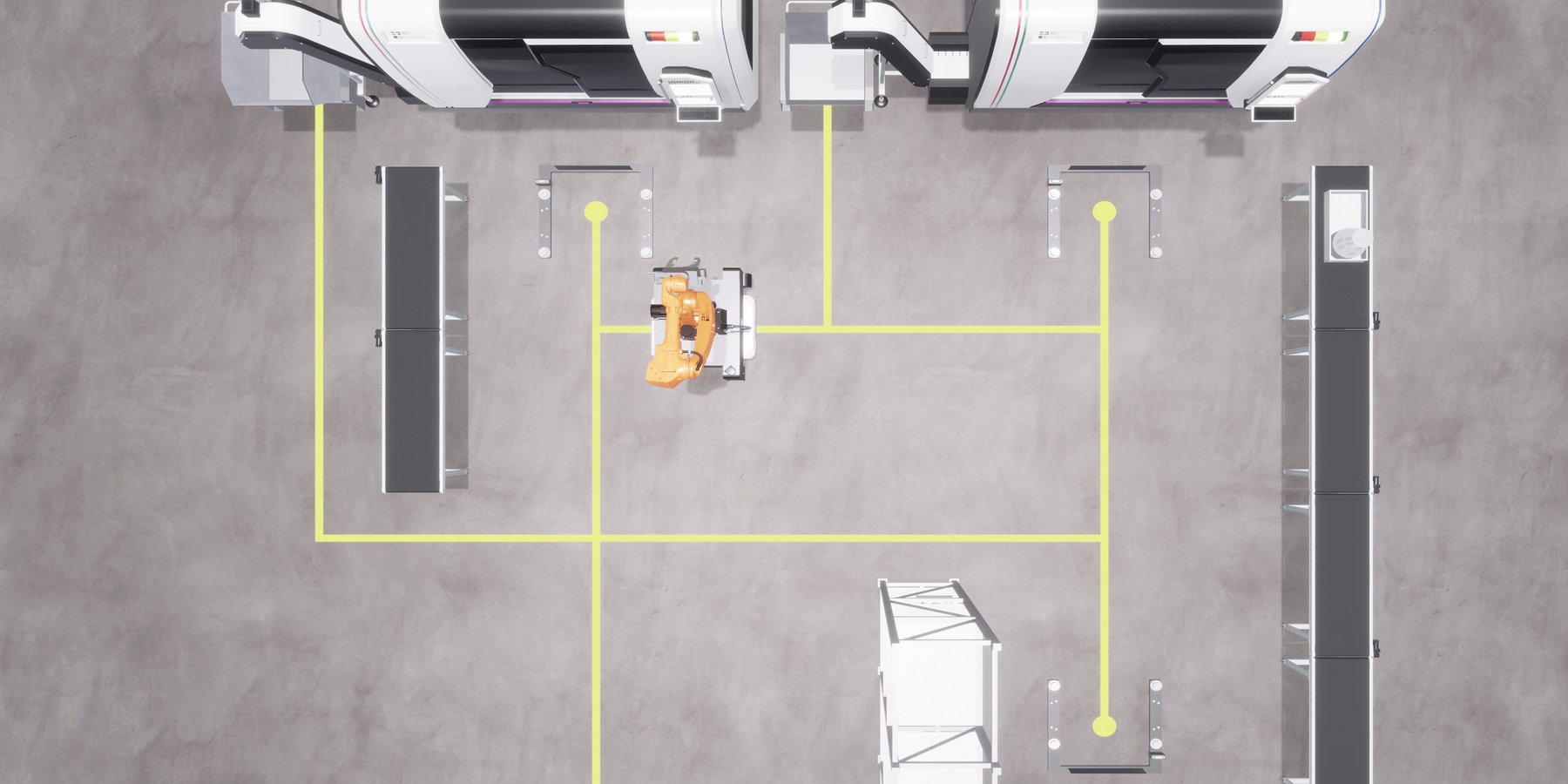
Der Transport zwischen den Einsatzorten erfolgt durch fahrerlose Transportsysteme (zum Beispiel KUKA KMP1500), die den Sockel unterfahren, anheben und zur jeweiligen Dockingstation bewegen. Dort wird die MRP-Einheit mechanisch fixiert und mit Strom, Druckluft und einer Kommunikationsanbindung versorgt. Der Roboter ist nach dem Andocken in wenigen Sekunden einsatzbereit, ohne dass eine zusätzliche Kalibrierung oder visuelle Referenzierung der Position, wie sie bei sonstigen mobilen Manipulatoren erforderlich ist, nötig ist.
Diese Systemarchitektur ermöglicht den flexiblen, wirtschaftlichen und präzisen Einsatz von KUKA-Großrobotik an wechselnden Standorten und bietet dabei alle Vorteile stationärer Automatisierung bei deutlich reduzierten Investitions- und Infrastrukturkosten.
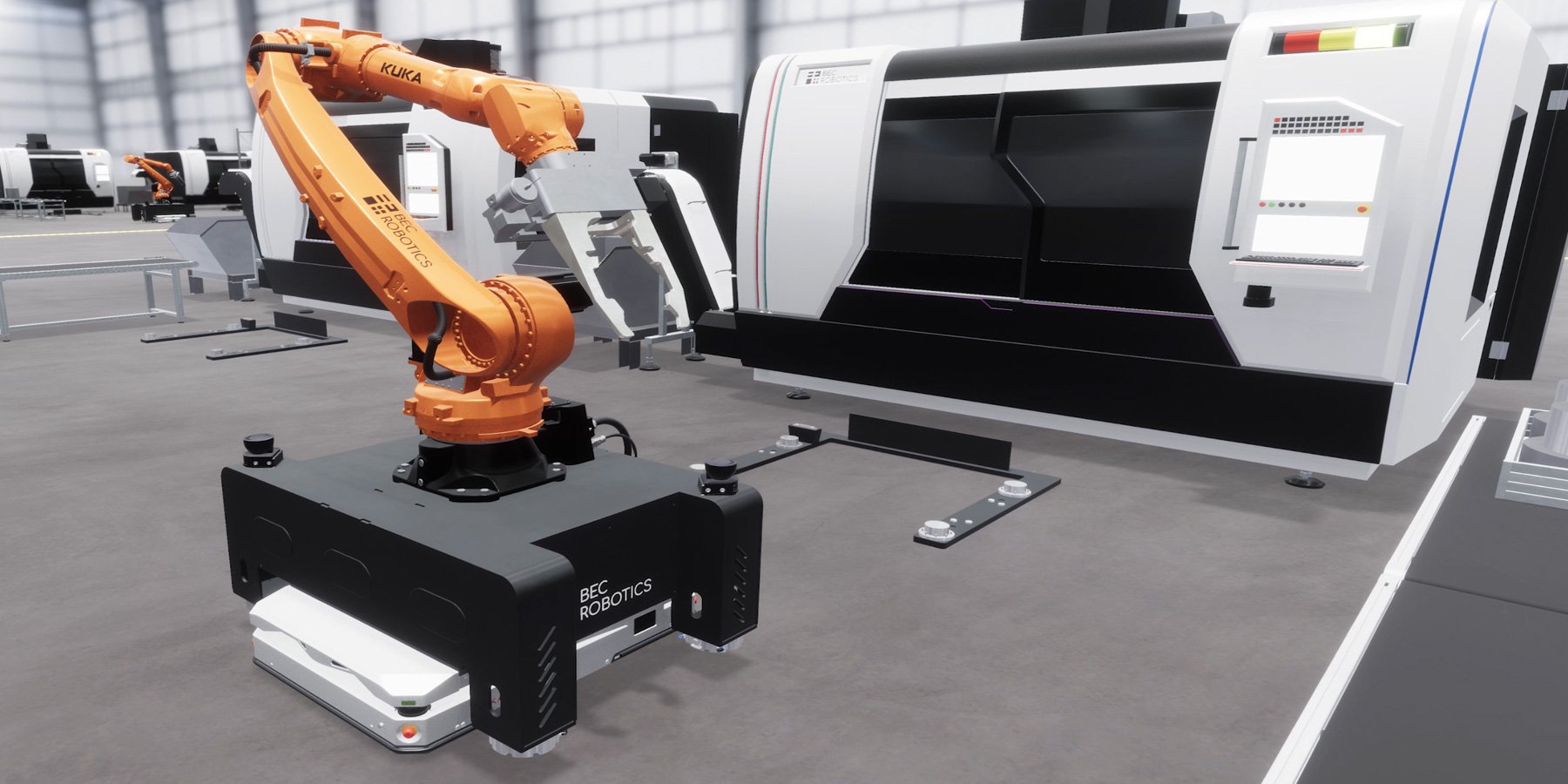



BEC Robotics entwickelt leistungsfähige mobile Manipulatoren und autonome mobile Roboter (AMR) für industrielle Anwendungen mit Traglasten bis 300 kg. Unsere modular aufgebauten Systeme kombinieren bewährte KUKA-Robotik mit robusten fahrerlosen Transportsystemen (FTS) und ermöglichen so den flexiblen Einsatz in der Industrieautomation, Intralogistik und in sensiblen Bereichen wie dem Reinraum. Durch ihre modulare Architektur können unsere Systeme exakt auf kundenspezifische Anforderungen abgestimmt werden, beispielsweise hinsichtlich Traglast, Reichweite, Greifertechnik, Energieversorgung (stationär oder batteriebetrieben) und Einsatzumgebung. So entstehen skalierbare, wirtschaftlich effiziente Automatisierungslösungen, die sowohl technisch als auch wirtschaftlich überzeugen.